

搜索
图片来源于网络
导读:根据手术机器人的适应症对每年市场规模进行了测算,手术机器人国内潜在市场空间为136.73亿元/年。其中,泌尿外科和妇科市场规模为15.73亿元,普外科为58.3亿元,心脏外科为62.7亿元。未来手术机器人的技术发展方向在于力触觉反馈系统、导航定位系统和自然腔道机器人系统。
《手术机器人行业调研》
目录
一、手术机器人的临床应用情况
二、国内手术机器人市场规模预估
三、手术机器人核心技术及发展趋势
力触觉反馈功能
定位导航系统
自然腔道机器人系统
四、总结
导读
医疗机器人是指用于医院、诊所的医疗或辅助医疗的机器人,大致可以分为手术机器人、康复机器人、护理机器人、救援机器人和转运机器人。其中,手术机器人在现阶段已经实现产业化和商业化,且大规模用于临床。最为典型的产品就是美国直觉外科公司(Intuitive Surgical)的达芬奇外科手术机器人。凯泰资本医疗投资团队在查阅和调研大量资料和案例后,对手术机器人临床应用、市场空间以及技术趋势进行分析和预测,从而挖掘手术机器人未来的投资机会。
我们希望借此机会,能够与同行和创业者共同探讨,助力手术机器人产业的发展。凯泰资本将持续关注本行业,文末附作者联系方式,欢迎同行和创业者进一步沟通和交流。
报告全文(约8000字)
01 手术机器人的临床应用情况
从科室来看,FDA审核批准的达芬奇手术机器人可以应用于超过10个科室的手术。

资料来源:公开资料整理
从手术类型看,达芬奇手术机器人临床应用可分为传统操作复杂的手术和较为简单的良性肿瘤切除手术两类。根据直觉外科公司年报,2015年美国手术机器人的总手术量为49.9万例,其中泌尿外科占20%,妇科占48%,普外占28%。具体科室和代表手术情况如下。

资料来源:直觉外科公司年报
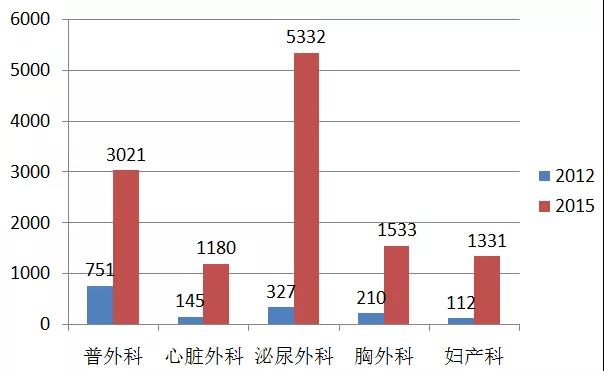
我国2013年及以前配置了18台手术机器人,2015年,我国的手术机器人数量大约为57台。截至2012年,我国手术机器人临床应用最多的三个科室为普外科、心脏外科和泌尿外科。
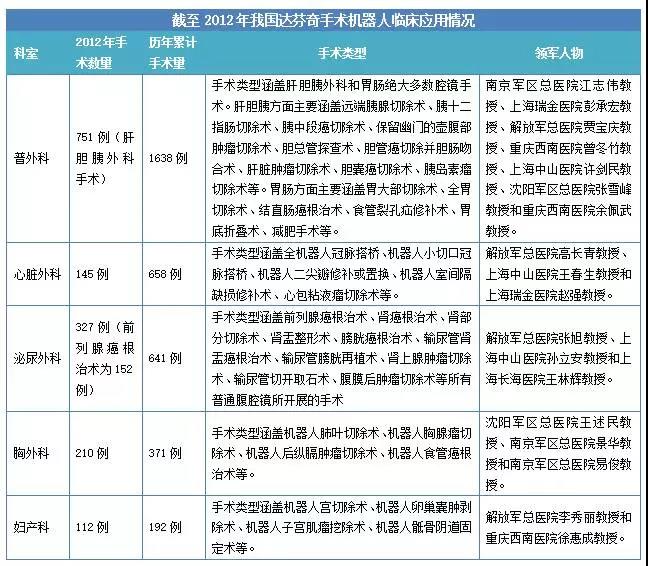
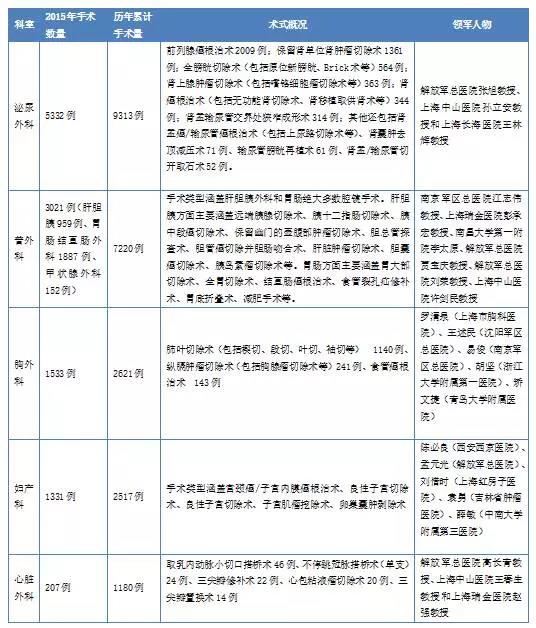
截至2015年12月,全国当年完成手术机器人手术11445例,历年总计完成手术22917例,临床应用最多的三个领域为泌尿外科、普外科和胸外科。
资料来源:http://medical.ofweek.com/2015-02/ART-11101-11001-28930094_2.html
2012年和2015年,国内手术机器人手术量比较
02 国内手术机器人市场规模预估
根据WinterGreen Research数据,2014年全球手术机器人市场规模达到32亿美元,预计在2021年达到200亿美元,复合增长率约为30%。现阶段,北美市场为最大市场,而由于政府医疗投入加大,医疗系统重组和人们对微创手术意识加强,未来市场重心将逐渐往亚洲市场转移。
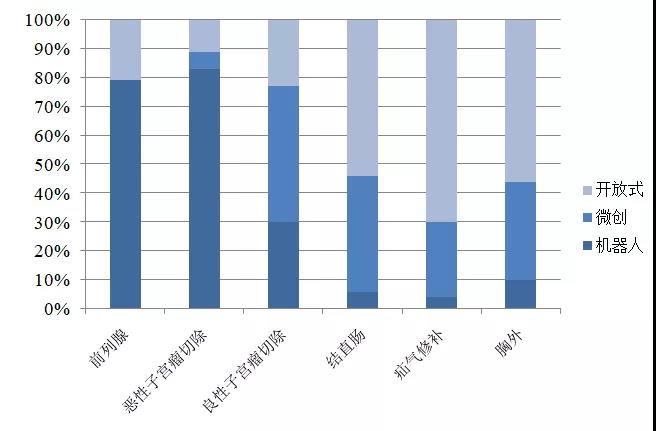
根据直觉外科公司报告,在已获得认证资质的国家中,全球每年有400万台手术能够使用达芬奇手术机器人完成,市场潜在规模巨大(按1%渗透率、200台手术/年、1000美元/台手术材料服务费估算,设备需求2万台,材料服务市场40亿美元/年)。在手术机器人最为普及的美国,除前列腺、组织细胞瘤等手术以外,开放式手术(如结直肠、疝气、心胸等)仍更为普遍,手术机器人具有发展潜力。
2015年美国部分专科手术方式统计
资料来源:公开资料整理
对于中国市场规模的估算,我们认为可以从潜在购买方需求数量以及适应症市场规模两方面进行估算。
对于中国市场,我们认为目前二级、三级医院将是手术机器人的潜在购买方,未来随着手术机器的成本降低和接受度提高,将逐步渗透普及。中国目前约有2000家三级医院、7000家二级医院,我们以5000台潜在需求、以每台手术机器人50万美元估算,潜在手术机器人设备市场规模约25亿美元(约150亿元);以每台机器人一年开展200台手术,每台手术1000美元的材料收入估算,手术材料潜在市场规模10亿美元/年(约60亿元)。
我们根据手术机器人的适应症对每年市场规模进行了测算,认为手术机器人国内潜在市场空间为136.73亿元/年。其中,泌尿外科和妇科市场规模为15.73亿元,普外科为58.3亿元,心脏外科为62.7亿元。
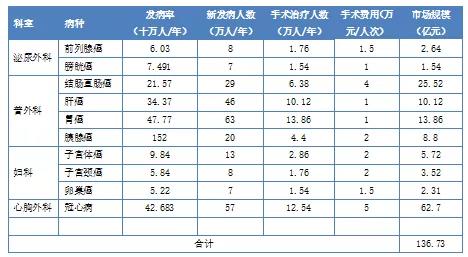
数据来源:Cancer Statistics in China,2015
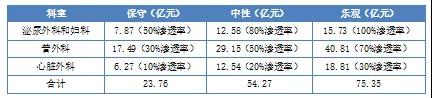
根据以上测算数据以及合理预计,对国内每年的手术机器人市场规模进行估算。因此,从保守、中性和乐观三种测算来看,现阶段我国每年手术机器人服务市场的规模为23.76亿元、54.27亿元和75.35亿元。但随着手术机器人成本降低以及技术水平提高,其在普外和心脏外科的渗透率也会提高,市场规模将进一步扩大。
03 手术机器人核心技术及发展趋势
手术机器人主要的功能模块包括人机交互与显示、医学图像、系统软件、机器人装置、定位装置。系统软件中的图像重构、空间配准和定位控制等,是手术机器人最为核心的部分;而硬件辅助装置如医学图像、机器人装置和定位装置需要与临床手术具体情况相结合;人机交互与显示必须充分考虑医生的需求和临床应用场景。
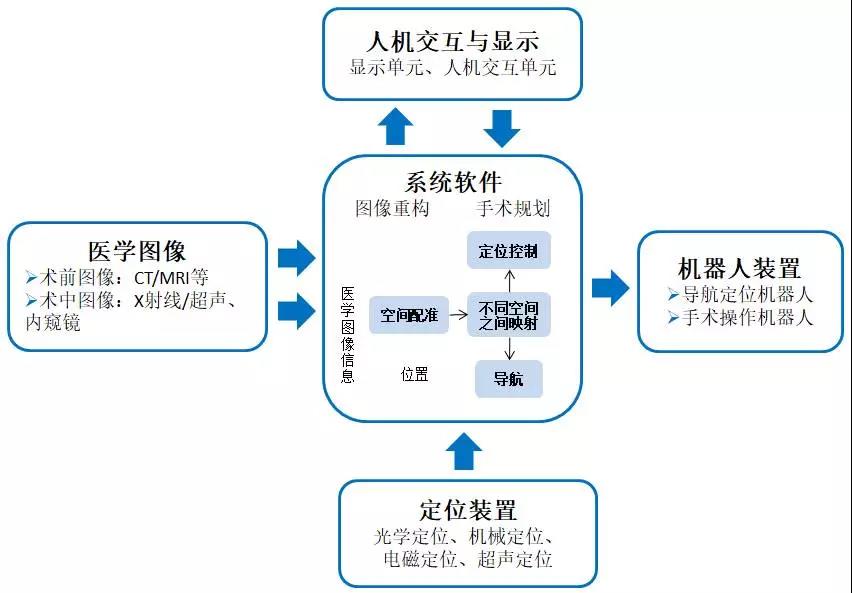
资料来源:网络公开信息
根据目前达芬奇手术机器人的技术水平以及全球其他相关技术的研发,我们认为未来手术机器人的技术发展方向在于力触觉反馈系统、导航定位系统和自然腔道机器人系统。
1、力触觉反馈功能
现阶段应用于腹腔镜临床手术的机器人大多采用视觉反馈系统,外科医生在控制机械臂做手术时,需要通过分析视觉信息,实时判断器械对组织的作用力以及其他组织特征,一定程度上影响手术效率。因此,力触觉反馈系统将成为机器人技术研发的重点方向。
(1)力反馈系统
外科医生远程操作手术臂时,通过器械末端的力传感器,感受器械所处位置及作用于组织上的力,并将其以电流的形式进行模拟和传导,之后再将力觉信息再现并传递给医生。
该系统的核心为力传感器与力觉再现技术:1)力传感器主要与手术器械连接,这就需要重新设计带有力传感的手术器械,还有一种解决方案是为机械臂设计一种带有力传感的机械抓手,通过抓手与手术器械相连,实现力反馈的功能。2)力觉再现技术包括感觉模拟技术和直接再现技术。感觉模拟技术是指将力传感器上所感受到的力觉信息,模拟成视觉或听觉信息,并且将这些信息通过显示器显示给外科医生;直接力觉再现技术,是通过力觉再现设备将传感器获取的力觉信息转换为相应的刺激,并且施加于医生的手指,以复现真实的感觉。这使外科医生能够快速地做出相应的调整。
(2)触觉反馈系统
手术机器人的触觉反馈,指机械臂操作器械作用于组织时,触觉传感器能够感受到组织表面的信息(例如组织顺应性、硬度、质地、温度等),并将这些信息反馈给医生,从而使医生获得对于组织的真实感觉,并能够对异常组织做出判断。触觉反馈系统主要由3部分组成:1)触觉信息的感受;2)触觉信息的处理,即将所获得信息进行处理,整理得到有效信息;3)触觉信息的再现,将有效信息再现给医生。
1)触觉传感器:触觉传感器通过与物体直接接触,能够测定出该物体表面的性质,包括物理的弹性、硬度、质地、温度等。当前所应用的触觉传感器类型,主要包括电容式传感器、光电式传感器、压电式传感器及压阻式传感器。但是目前这类传感器多处于实验室阶段,暂未在手术机器人领域进行应用。
2)触觉信息处理: 触觉信息的处理系统是触觉反馈系统的重要组成部分,该系统可以应用多种算法来处理触觉信息,包括简单的触觉信息和复杂的触觉信息。为了减轻医生负担,对于复杂触觉信息的处理能通过多种方式进行简化,该系统也可以对多种不同的触觉信息进行处理。
3)触觉再现技术: 包括图像模拟技术与直接再现技术。近年来,许多研究者在腔镜系统上采用图像模拟技术,在模型上进行肿块定位实验,取得了较好的效果。直接的再现技术,是指安装在医生手上的触觉再现设备,接受机械臂上的触觉传感器输出的机械臂与组织接触的信息,刺激人体的相应部位,从而再现机械臂与组织接触的情况。该再现技术应用了微型电机技术、记忆合金技术、气压驱动技术直觉再现技术充分考虑到医生触觉的特性,符合生理习惯,因此显示出了极大的优势。该技术还处于实验阶段,没有应用于临床。
触觉反馈技术的发展趋势包括:1)根据临床应用设计手术器械,使其可以满足力触觉反馈的需求;2)完整的触觉再现技术涉及形状、纹理、硬度以及温度等物理属性重现;3)将力觉和触觉反馈系统有效的结合,则医生可以通过触觉反馈系统辨别出不同的组织特性,之后根据所感受到的不同的组织特性,施加给机械臂最佳的作用力,这样能够更有效的提高手术安全性;4)力触觉反馈系统与虚拟现实技术和远程外科技术联合研究可以实现远程外科培训;5)力触觉反馈的实现依赖网络传输,但可能会有时间延迟的潜在风险,相应的控制系统开发将成为重点。
香港理工大学与香港大学李嘉诚医学院协力开发的NSRS外科机器人系统,与现时需要在腹部开多个切口(3至6个)的达芬奇系统相比,NSRS可经由单一切口或自然腔道进入人体(无切口),功能覆盖各类腹腔或盆腔手术。基于机械臂内的微型马达处于接近末端执行器(手术工具)的位置,机械臂不单能执行高精确度的动作,还能提供高敏感度的触觉或力度反馈。NSRS是全球首个配备了内置马达,能够以细小的体积产生足够力度,以施行各种体内手术的外科手术机器人系统。
2、 定位导航系统
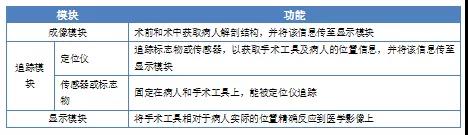
手术导航系统使医生在微创手术时能了解手术工具相对于解剖结构的位置。在手术导航系统出现之前,医生只能依靠内镜进行微创手术,或实施开放式手术。相比开放性手术,微创手术有创伤小的优势;相比内窥镜介导下的微创手术,手术导航系统导航下的微创手术有精度高、使用范围广的优势。手术导航系统一般包括三个模块,具体如下表。
(1)成像模块
理想的成像模块应能实时三维成像,并能分辨病人组织和手术工具,同时不对病人和医生的健康产生危害、不阻碍医生进行手术。目前还不存在满足上述所有要求的医学成像设备;在5类常用医学成像设备中,MRI、超声最接近以上要求。
(2)追踪模块
理想的导航系统并不需要追踪模块(解剖结构和手术工具都能被成像模块以三维图像显示出来),但因为目前成像设备存在性能局限性,需引入一套追踪模块来定位手术工具和病人。
目前常见三种定位系统 :1)磁场定位;2)光学定位;3)机械定位。这三种定位系统在定位精度上都能满足目前手术导航系统的需求,但每种系统都有其局限性:磁场定位易受铁磁性物体干扰,而且不能和MRI设备同时使用,精度约为1mm和0.5°;光学定位必须保证光路畅通,且所追踪物体必须为刚性,其分别率可达到(<0.1mm);机械定位灵活性有限,设备所占体积较大。对于腹腔手术而言,例如肝脏等软组织多位于人体较深部位,光学定位可能会受到一定的限制,通过腹腔镜进行机械定位是目前手术机器人的主流技术选择。
三种追踪模块

资料来源:网络公开信息
(3)显示模块
显示模块将术前成像、术中成像、手术器械、患者所处物理空间与定位系统的坐标进行统一,为手术提供更准确的定位信息。这一过程主要分为两步:一是使这些影像及信息的坐标系达到空间位置的一致,即配准过程;二是对已配准图像及位置信息的综合显示,即融合过程。此外,显示模块的设计还会考虑如何使显示效果更直观,比如使用立体显示技术或现实增强技术。
手术定位导航系统的技术发展趋势包括:1)成像模块的发展趋势主要有现有医学成像设备性能的提升和新医学成像技术的开发。2)追踪模块已经能提供足够的定位精度,未来的发展趋势可能为生产成本的降低。3)显示模块中的配准算法是目前手术导航系统误差的主要来源(可占75%),所以还有很大的提高空间。另外三维重建算法也有改善的空间,如提高重建效率和组织识别精度。
MST是一家位于以色列的领先的医疗器械研发公司,以数十亿美元的微创手术市场为目标,主要产品为用于腹腔手术的“AutoLap”,其腹腔镜定位系统能自动为手术导向和固定。它和Xbox相似,可以识别医生的手势,还可与医生手上的无线设备交互作用,提供在患者身体内获取的数据及分析结果,并帮助医生操作。MST的技术核心是利用军方在军事技术方面的影像分析方面的数据和技术,进一步应用起来做实时控制的分析。2015年6月上市公司海思科(002653)斥资1050万美元认购以色列医疗器械公司MST的部分股份,并获得了Autolap在中国15年的销售代理权。
3、自然腔道机器人系统
经自然腔道内镜手术(natural orifice transluminal endoscopic surgery,NOTES) 是指通过自然孔口(口腔、肛门、阴道口、尿道口等) 进入腹腔或胸腔进行操作的一种外科手术。目前,有机构在达芬奇手术系统上进行NOTES动物实验,但临床推广极难。主要原因在于:1)达芬奇手术机器人较为庞大,容易与患者身体碰撞;2)狭小的自然腔道导致操作空间狭小,手术操作非常困难;3)人体解剖机构的差异,如阴道穹窿与骶骨胛间的角度及骨盆形态学特征等。
拥有卡耐基梅隆大学背景的医用机器人公司Medrobotics已经研发成功蛇形/柔性管状机器人Flex System。医生将其插入患者的嘴巴,通过操纵杆来控制其移动。医生可通过前端有的摄像头在患者气管内移动机器人,看到并到达非常难到达的解剖区域。在实际应用中,外科医生使用可弯曲机器人The Flex进行手术,无需在患者下巴或其他位置进行切口手术了。可弯曲机器人The Flex找到目标后,在主气管两侧塞入两个小管子使机器人变坚硬,从而为提供一个稳固的手术平台。医生可从工作台中切换包括手术刀、剪刀、镊子在内的各种工具。
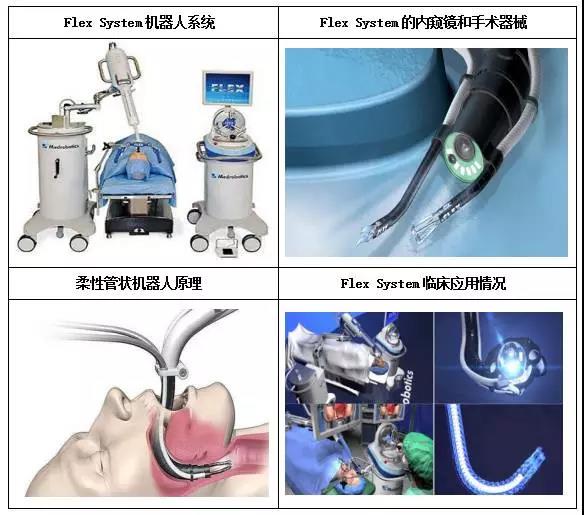
资料来源:Medrobotics官网
此外,由于达芬奇手术机器人的一体机设计,在面临某些专科手术过程中存在障碍,因此,我们也重点关注骨科、神经外科、眼科、口腔科等专科领域的手术机器人。
04
总结
1、国内手术机器人在泌尿外科、普外科、胸外科、妇产科及心脏外科的临床应用不断提升;
2、理论上,现阶段我国手术机器人每年的市场规模在50亿元左右,随着针对适应症种类增加及渗透率提高,手术机器人在国内每年市场空间超过100亿元;
3、手术机器人的技术突破将在于力触觉反馈系统、导航定位系统和自然腔道机器人系统。
参考文献:
《手术机器人面临的一大挑战——力触觉反馈》郭松、杨明杰、谭军,2013年8月,《中国生物医学工程学报》
《柳叶刀·肿瘤学》报告宣称:中等收入国家大约有22%的癌症病人能得到手术治疗。
中国医学科学院,肿瘤医院,肿瘤研究所泌尿外科(2008年)。http://www.doc88.com/p-2048109856295.html
复旦大学胰腺肿瘤研究所统计数据:http://news.163.com/15/0202/15/AHF7JM0H00014AED.html
十九届全国介入心脏病学论坛(CCIF2016)
文中部分图片引用于网络公开信息
作者:刘沅
凯泰资本副总裁,负责医疗服务、清洁能源方向的投资工作,参与璞迈医疗、中科体检、能新科、奇想达等项目的投资。刘沅先生毕业于英国纽卡斯尔大学,经济学硕士。
联系方式:liuyuan@kaitaicapital.com

苏ICP备2021034345号 版权所有:苏州蓝点医疗科技有限公司 互联网药品信息服务资格证编号:(苏)-非经营性-2021-0189










请登录后参与评论...
登录后参与讨论
提交评论